●公募班

Takashi Ikegami |
Kei Senda |

Toshio Aoyagi |

Jun Nishii |
Atsuko Takamatsu |

Sadao Kawamura |

生命の自律性解明のためのロボットの自律運動生成実験とハエの探索行動実験
(研究代表者:池上高志・東京大学大学院総合文化研究科・准教授)
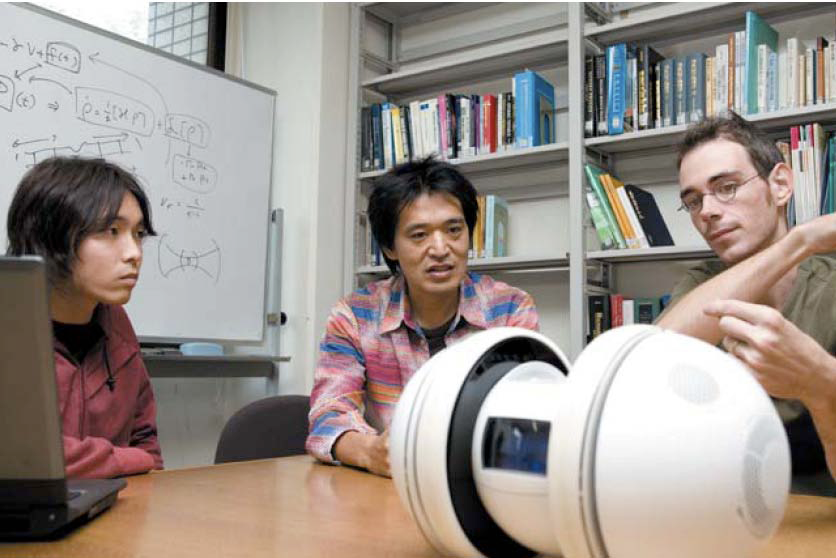
音声入力に反応する自律的に運動するロボット
蝶の羽ばたき飛翔における環境創成による移動知発現のメカニズム
(研究代表者:泉田 啓・金沢大学大学院自然科学研究科・教授)
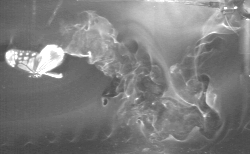
蝶の羽ばたきで誘起される渦 動的素子のネットワークに於ける環境に対する適用メカニズムの研究
(研究代表者:青柳 富誌生・京都大学大学院情報学研究科・講師)

神経ネットワークと発火パターンの相互作用
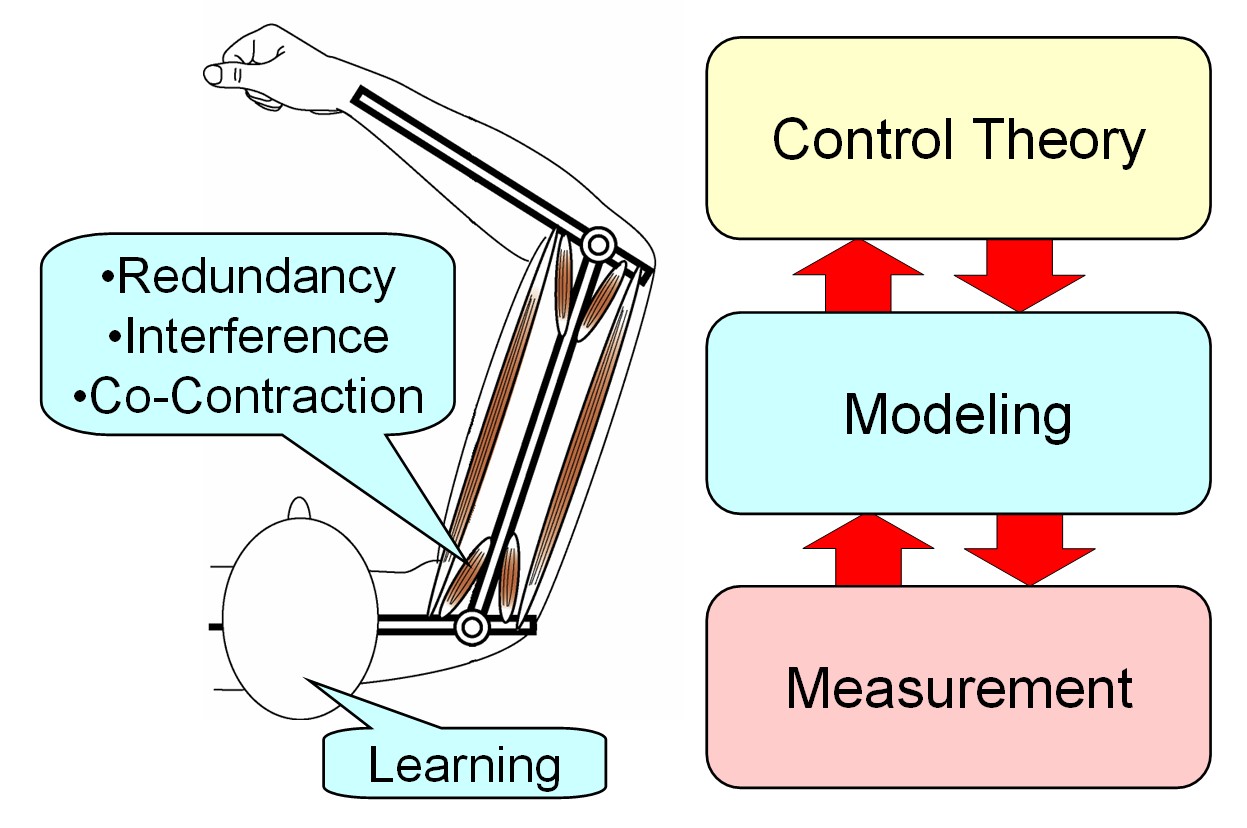
ばらつきを許容する生体の運動計画とその実現アルゴリズム
(研究代表者:西井 淳・山口大学大学院理工学研究科・准教授)
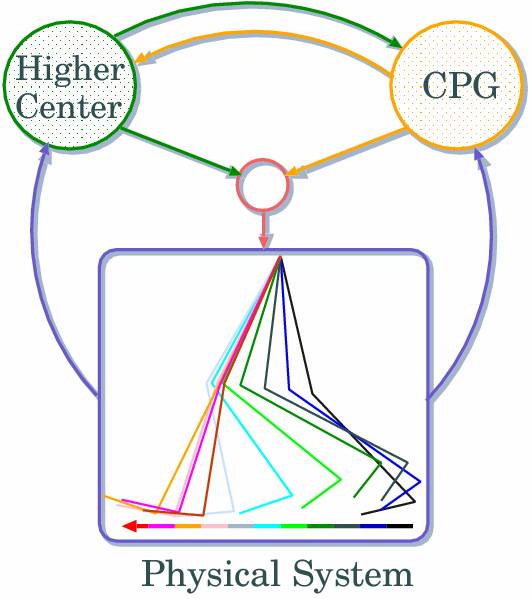
歩行の運動計画と学習制御
真正粘菌変形体の環境依存の動的ネットワーク形成による適応行動と機能創発
(研究代表者:高松 敦子・早稲田大学理工学部・准教授)
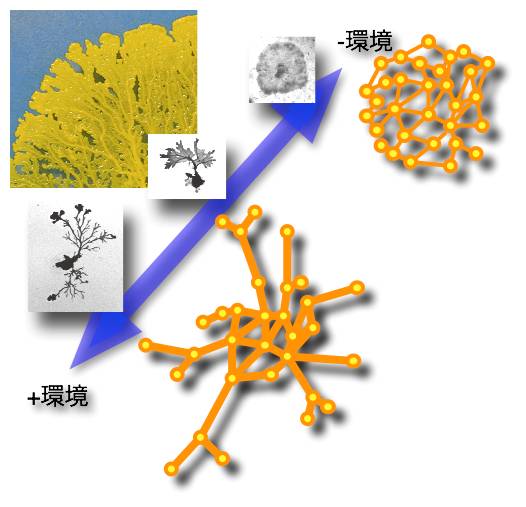
環境応答する真正粘菌変形体のネットワーク形態
生体の運動習熟過程の計測とモデル化
(研究代表者:川村貞夫・立命館大学理工学部・教授)
生体の運動習熟過程の計測とモデル化 |






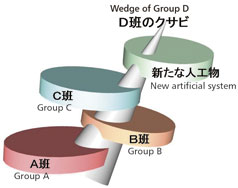
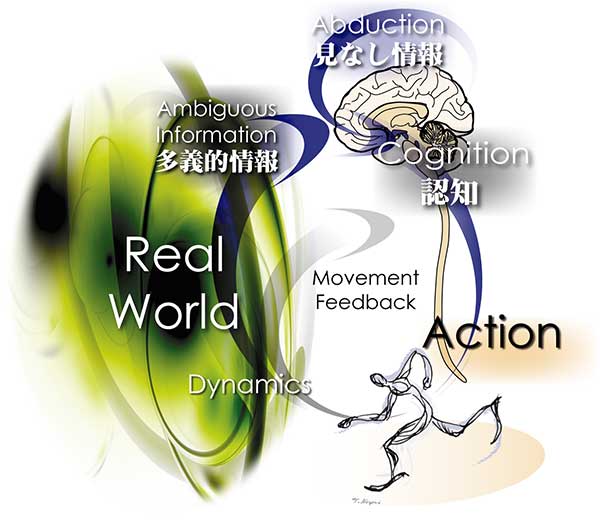
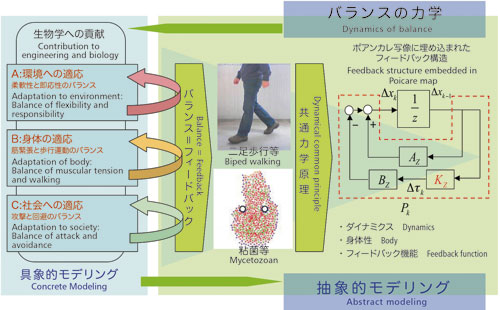 共通力学原理探求
共通力学原理探求