|
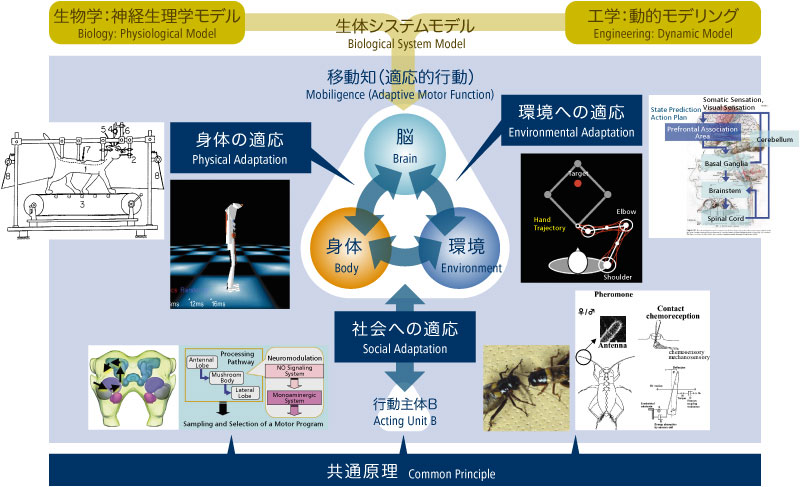
特に,適応的行動能力の中でも,(1)環境の変化に適応させ,認知するメカニズム,(2)環境に対して身体を適応させるメカニズム,(3)他者ならびにその集合体としての社会に適応させるメカニズム,という三つの適応機能に注目し,それぞれ三つの班を組織し,研究を行うとともに,移動知生成の普遍的な共通原理の解明を探る.計画班においては,具体的な例題として,腕のリーチング動作における環境認知・適応メカニズムの解明,歩行動作における身体適応メカニズムの解明,昆虫における社会性行動の適応メカニズムの解明などに取り組むとともに,力学的な観点から移動知の共通原理に迫る.また,公募によって,さらに多様な対象に関する適応メカニズムを取り上げつつ,その普遍的な基本原理を明らかにする.
|