●公募班
Hiroshi Yokoi |

Takafumi Suzuki |
Yoshio Sakurai |

Yasushi Kobayashi |

Kazuhiko Seki |

Atsushi Nambu |

Shinji Kakei |

Takashi Hanakawa |

歩行困難者補助のための反射運動系のモデル化に関する研究
(研究代表者:横井浩史・東京大学大学院工学系研究科・准教授)
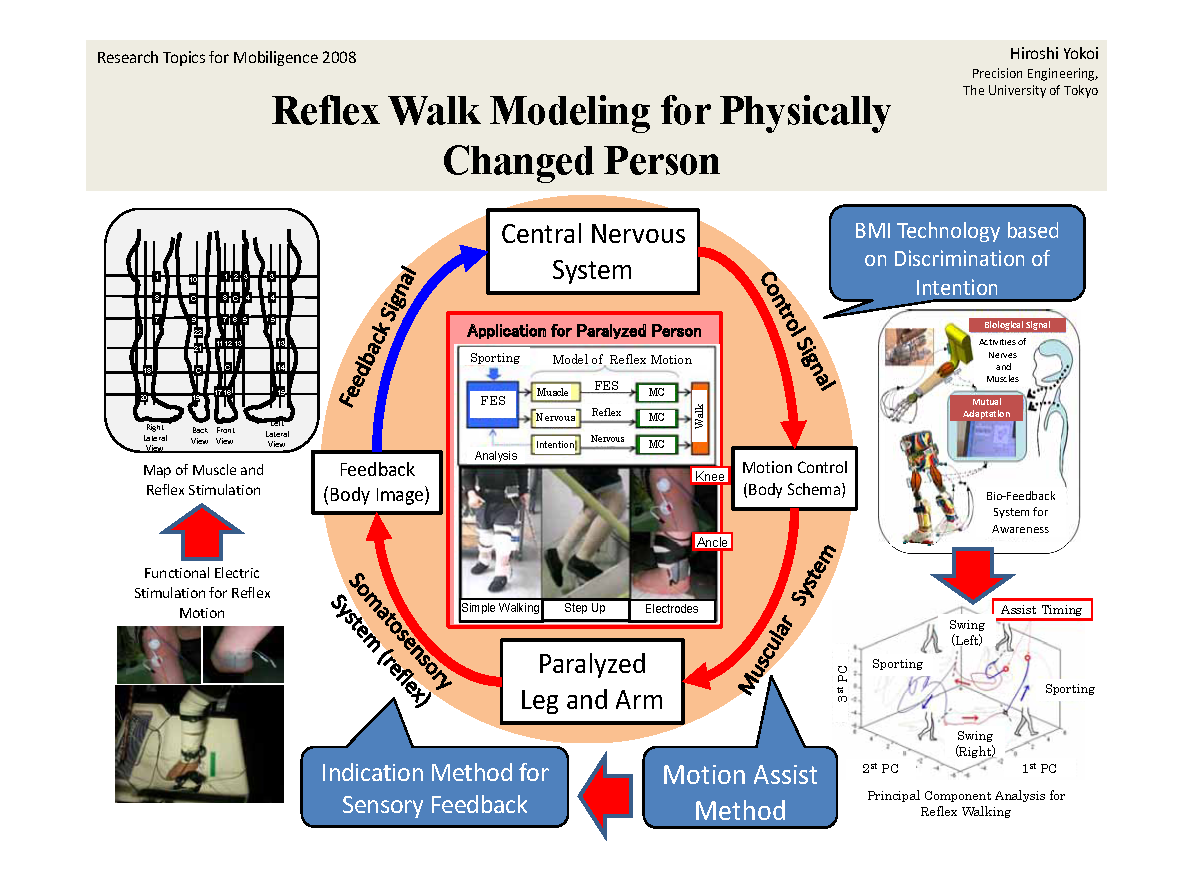
歩行困難者補助のための反射運動系のモデル化に関する研究
ラット– マシン融合システムと多機能神経電極による生体運動中枢の適応機能の解明
(研究代表者:鈴木 隆文・東京大学 大学院情報理工学系研究科・講師)
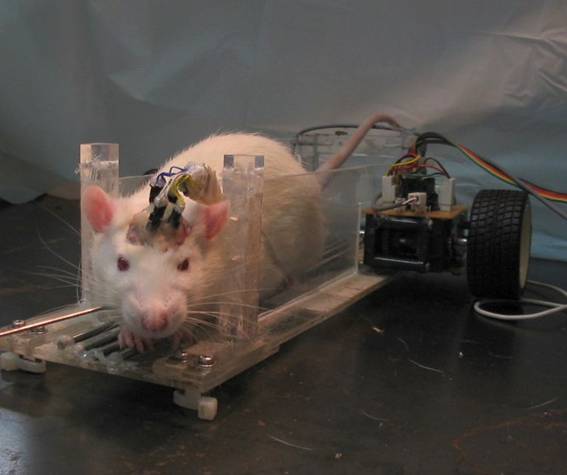
運動野の神経情報で制御されるラットカー
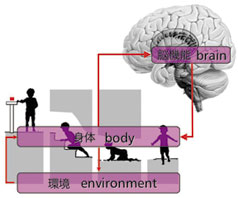
情報を表現する神経活動における身体の役割をBMI法で解析する
(研究代表者:櫻井 芳雄・京都大学 大学院文学研究科・教授)
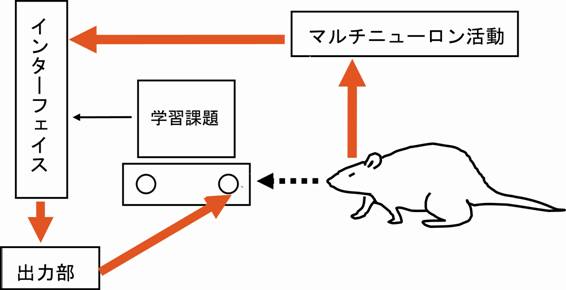
情報コーディングの身体性をBMIで探る
脳幹– 中枢– 基底核におけるやる気の生成,強化学習機能の解明
(研究代表者:小林 康・大阪大学大学院生命機能研究科・准教授)
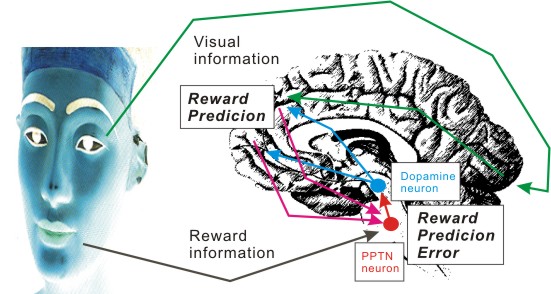
強化学習、動機付け生成の計算機構を探る
筋シナジーを形成する脳内機構を解明する
(研究代表者:関 和彦・生理学研究所 発達生理学研究系・助教)
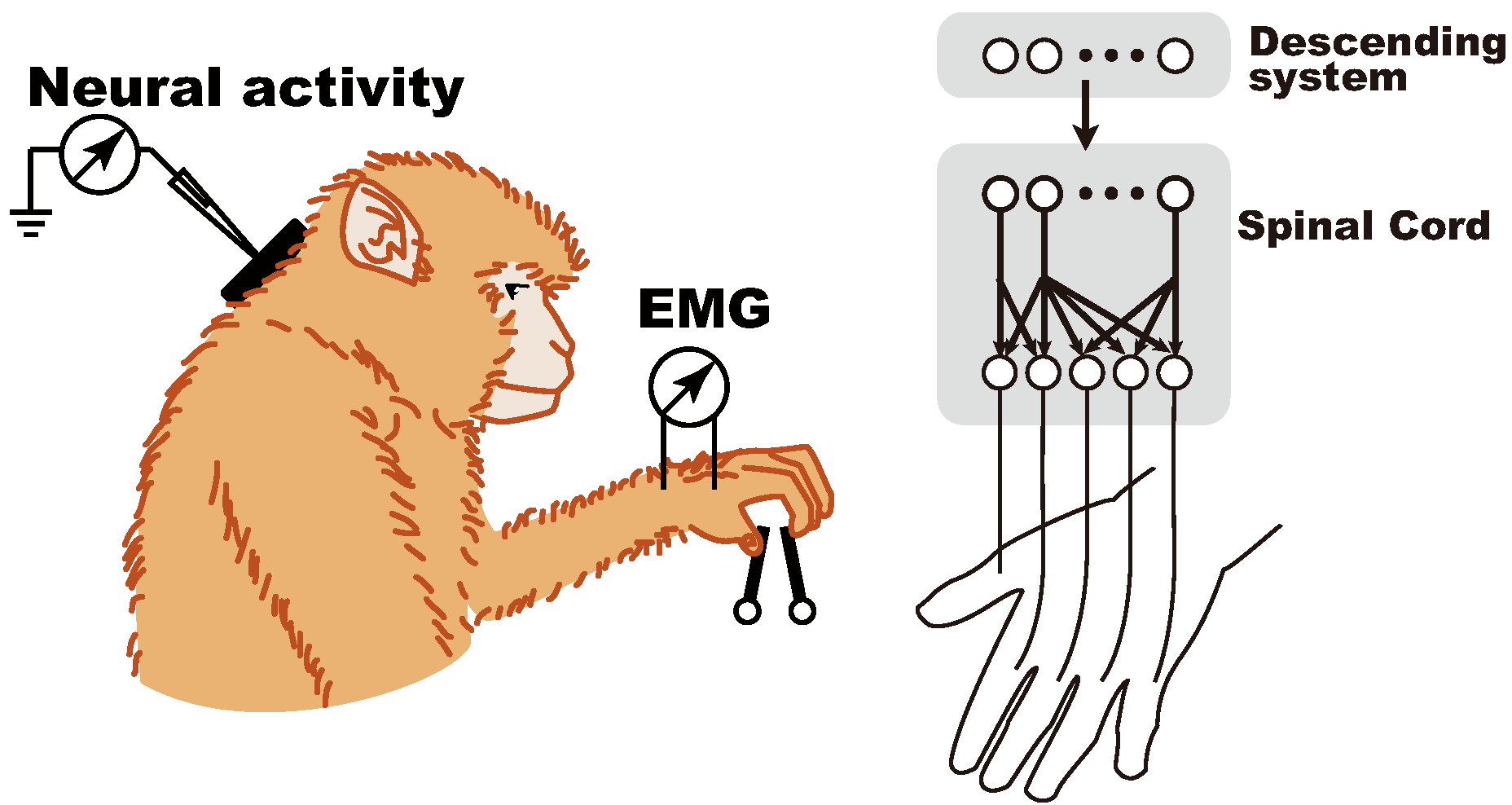
筋シナジー形成の脳内機構を探る
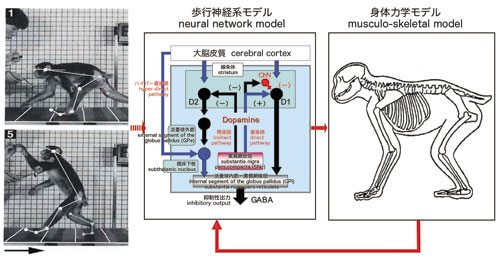
大脳基底核による最適運動制御
(研究代表者:南部 篤・生理学研究所 統合生理研究系・教授)
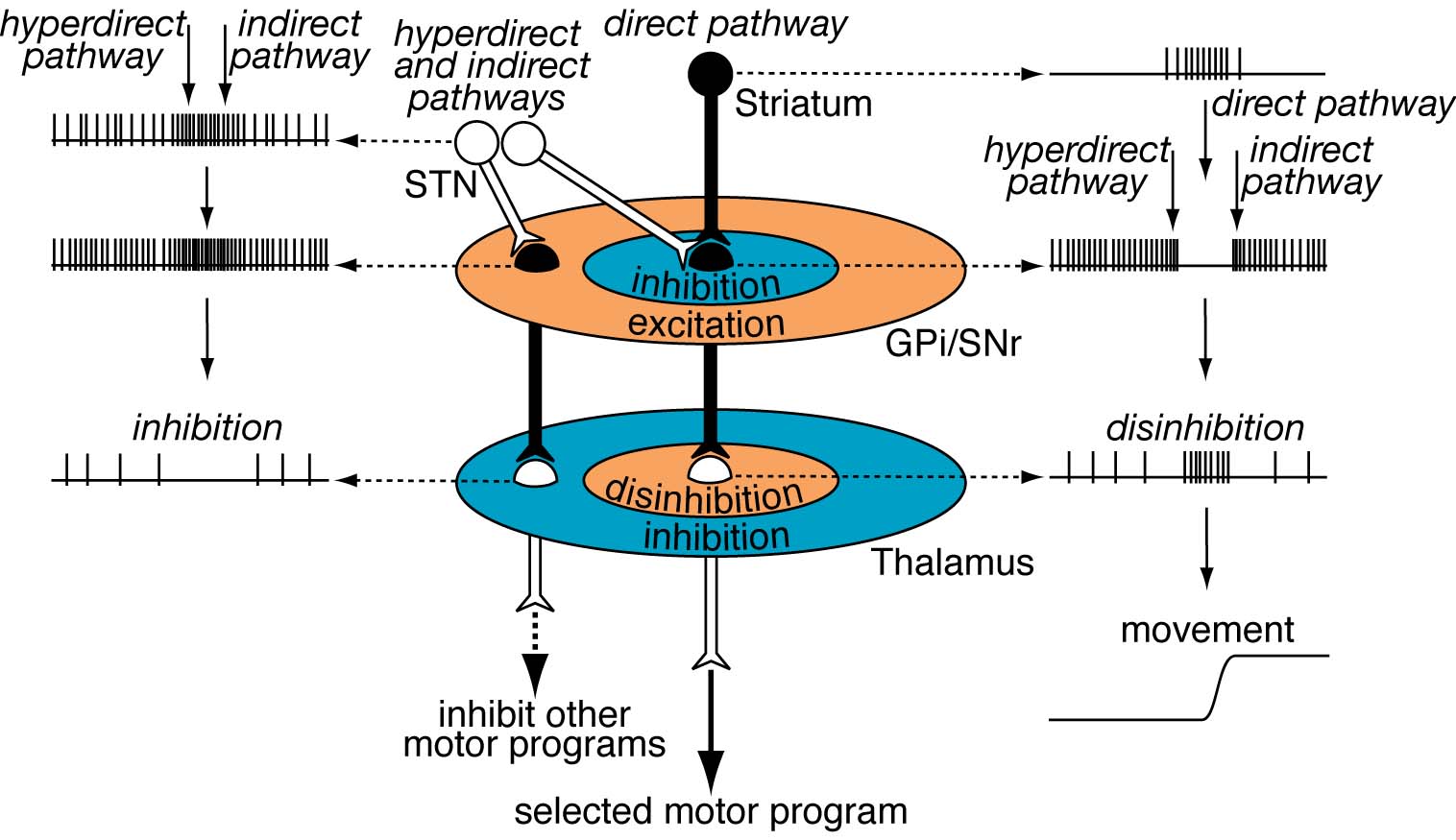
大脳基底核の機能を説明するモデル
小脳および基底核疾患における適応・制御異常の筋空間での定量的評価
(研究代表者:筧 慎治・財団法人東京都医学研究機構東京都神経科学総合研究所・研究員)
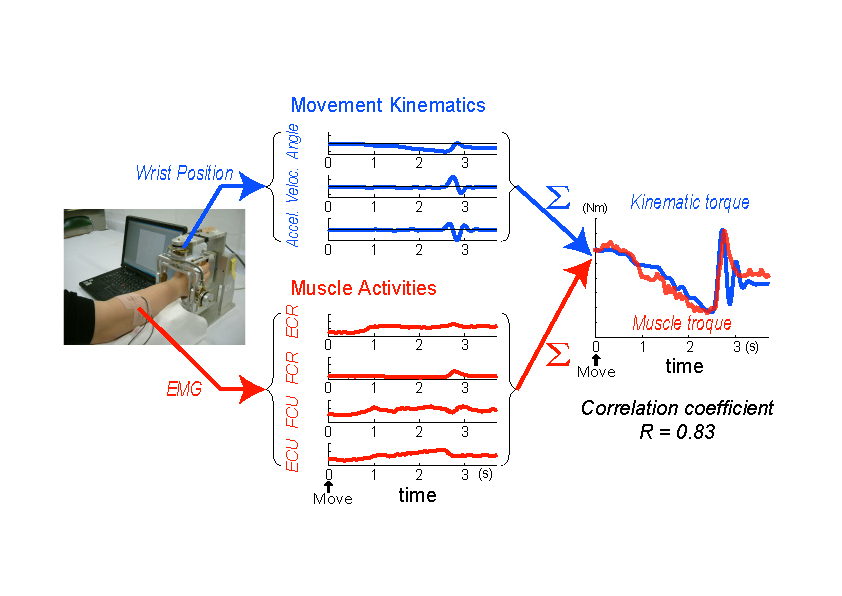
手首運動の「筋空間」による表現
多角的計測に基づく歩行の環境適応メカニズムの計算論的理解
(研究代表者:花川 隆・国立精神・神経センター 神経研究所 室長)
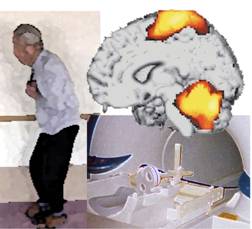
イメージングによるヒト歩行制御機構の解明
|