Subscribed Research Groups

Takashi Ikegami |
Kei Senda |

Toshio Aoyagi |

Jun Nishii |
Atsuko Takamatsu |

Sadao Kawamura |

Studying autonomous robots and explorative behaviors of flies to understand biological autonomy
(Leader: Takashi Ikegami, The University of Tokyo)
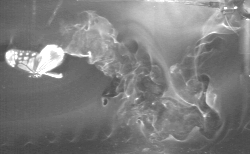
Emergence of mobiligence by environment-generation in flapping flight of butterfly
(Leader: Kei Senda, Kanazawa University)
A study on adaptation to environments in a network of dynamical elements
(Leader: Toshio Aoyagi, Kyoto University)

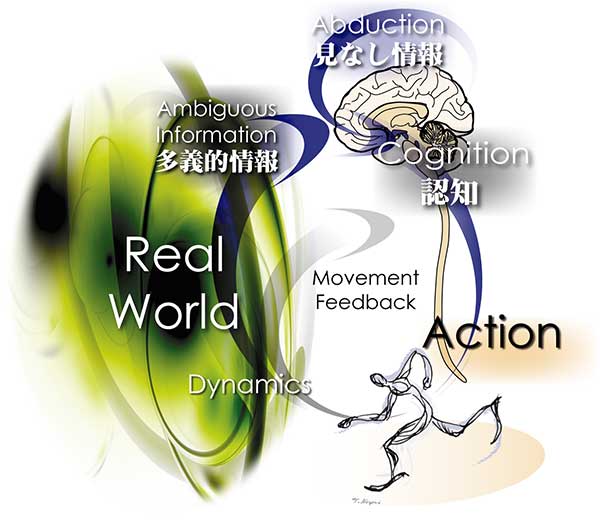
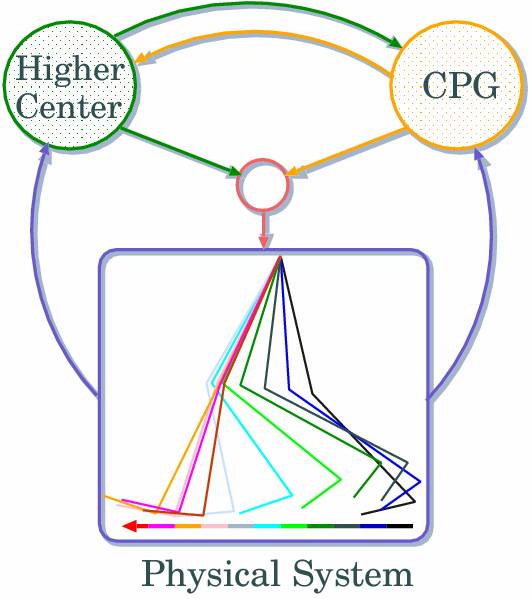
Basic strategy for trajectory planning in living movements
(Leader: Jun Nishii, Yamaguchi University)
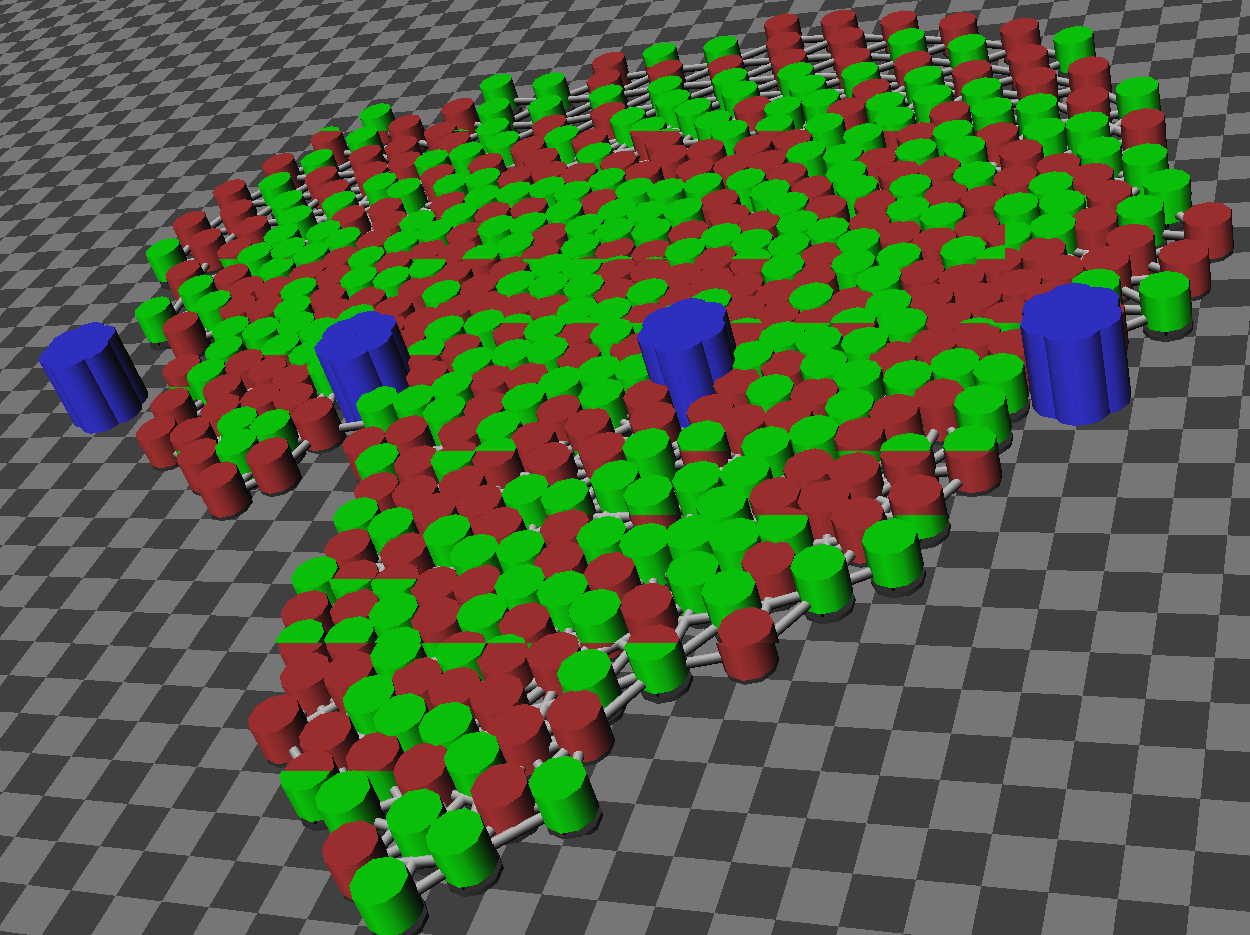
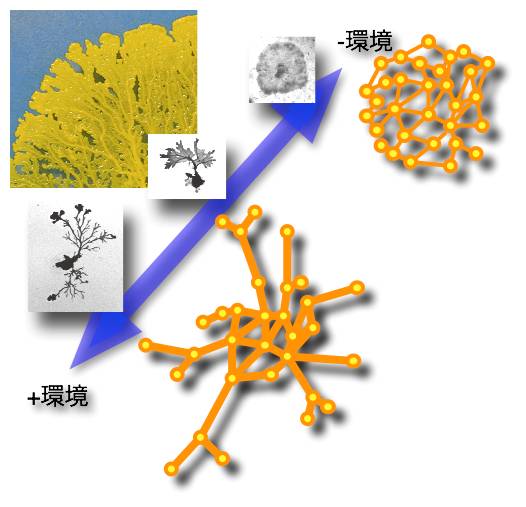
Adaptive behavior and emergence by environment dependent formation of dynamical network in
Physarum plasmodium
(Leader: Atsuko Takamatsu, Waseda University)
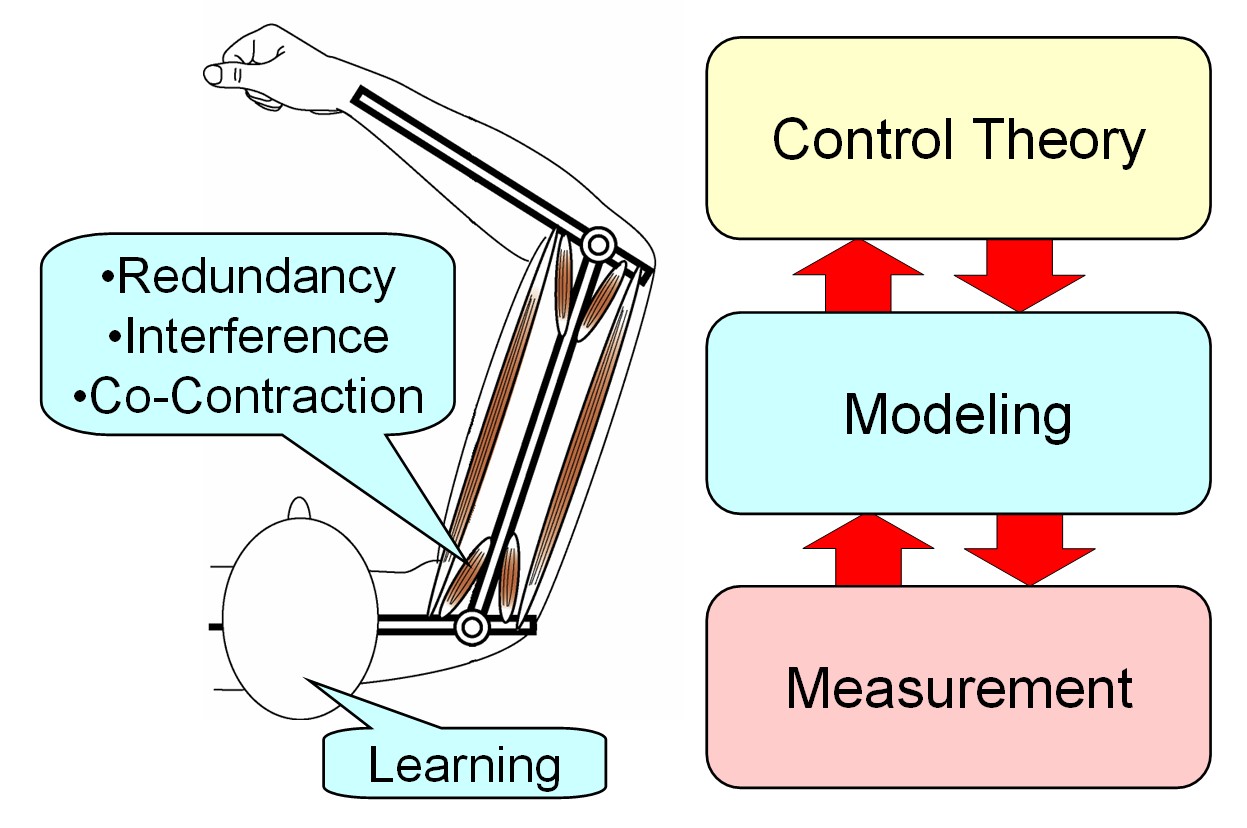
Measurement and modeling of human movement mastery process
(Leader: Sadao Kawamura, Ritsumeikan University)
|





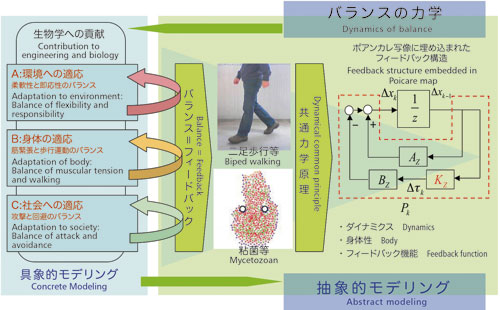 Research of dynamical common principle
Research of dynamical common principle