
人間が操作する移動ロボット群システム
本研究では,一人の操作者が移動ロボット群を効率よく操作するための手法を提案し,操作者とロボット群の協調による作業達成を可能とするシステムの構築を行う.この場合,人間と移動ロボット群の一対多の関係であるため,操作者への負担が大きくなる傾向にある.そのため,操作者への情報提示,及びロボット群への指令という 2 つの観点から研究を進める必要がある.
操作者への情報提示に関しては,従来カメラ画像に基づく視覚情報が主であったが,それに加えて力覚・音声情報を提示することとした.その結果,対象物がカメラ視線から外れ,視覚情報に欠落がある場合などもその他の力覚情報などにより作業が続行可能であり,実験によってもその有効性が確認できた.操作風景を Fig. 1 に示す.
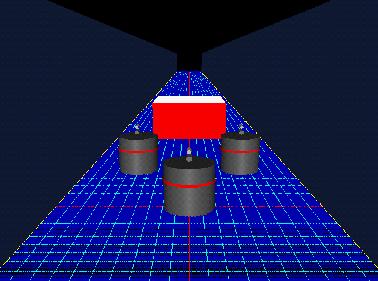
ロボット群への指令に関しては,操作者がロボット群を操作して作業を行うのでは操作が煩雑となる.作業としては移動により実行される押し動作による搬送作業を考えるが,操作者が作業対象物の挙動を指示した後は,ロボット群がその動作を自律的に実行する対象物操作レベルの実装を図る.そのためにはまず以下の問題の解決を図る必要がある. (1) 計算機内に環境情報(障害物の有無,対象物の形状・位置の認識)の保持が必要, (2) 個々のロボットの位置・姿勢の把握が必要,という問題である.未知環境内において以上の問題の解決をシステムが自律的に行うことは困難であるが,人間が適宜介入することにより解決が容易となる.前者に対してはロボット上にカメラを設置し, 2 台のロボットにより両眼立体視を行い対応する. 2 画像の対応付け問題は人間がロボット上のレーザポインタを操作して明示的に対応点を指示することで解決する.後者に対してはロボット上にマークを搭載し,それを観測用ロボットが後方から観測することで解決する.システム構成を Fig. 2 に示す.獲得した情報により仮想環境( Fig. 3 参照)を構築し,対象物操作レベル指令の実装の準備が整った段階である.
Keywords: Human Robot Interaction, Group Control, Multiple Mobile Robots, Cooperation, Environment Recognition
参考文献
Fig. 1 Force-feedback Operation Fig. 2 Our Proposed System Fig. 3 Virtual Environment