 ü@
ü@
Mobile Robot Group System Controlled by a Human
In this study we propose an operation method to easily control mobile robot groups by a single human user and build a system in which the human user and robots achieve tasks cooperatively.
In order to control multiple robots and to reduce the burden on the human user, we do our research regarding two aspects; displaying sufficient information to the user and controlling the robots with appropriate commands.
Regarding displaying, in addition to the visual camera image, we introduce haptic and sound information. As the result, even if the occlusion problem occurs, other information, force or sound compensates the lack of information and the task succeeds. Figure 1 shows the operation view where the user controls the robots with force-feedback joystick.
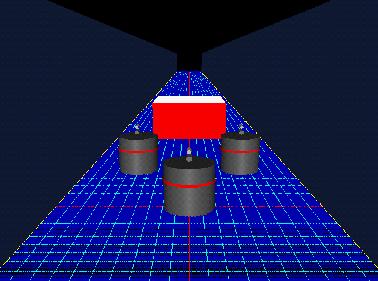
As for commanding, we plan to implement object-command level, in which, the user operates a simple model on the computer display, instead of commanding each robot respectively, and the robots autonomously manipulate the real object as the user says. In order to achieve the command level mentioned above, we must solve two problems; that is, environment recognition and self-positioning problems. Concerning the former problem, the two robots, each robot has a monocular camera acquiring the 3D-position of a point in the environment by stereo vision method. The human user operates laser-pointer installed on the robot to clearly indicate the corresponding point between two images in stereo vision method (see Fig. 2). As for the self-positioning problem, we set the landmarks on the robots, and the robots measure their position each other. In each phase mentioned above, the human user gives commands to the robots appropriately. By solving the above problems, we can make virtual environment in the computer (see Fig. 3). It is one step to implement object-command level.
Keywords: Human Robot Interaction, Group Control, Multiple Mobile Robots, Cooperation, Environment Recognition
References
ü@
ü@
Fig. 1 Force-feedback Operation Fig. 2 Our Proposed System Fig. 3 Virtual Environment