

According to intelligence of mobile robots, there are many researches
trying to extend its application range from factory to home-office environment.
This research agrees with supporting a robot by arranging its working environment.
We aim at the construction of robot system (Fig.1) that can work efficiently
in the home-office environment where its configuration is usually changed.
The system should be useful to various tasks. Concretely speaking, this
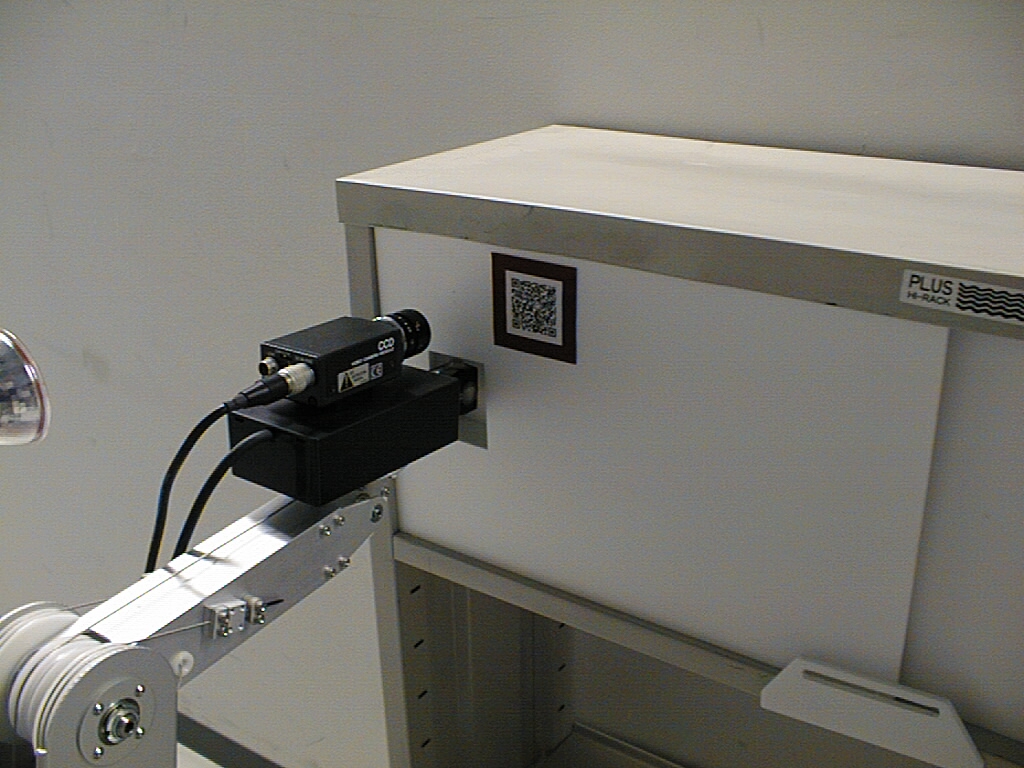
research realizes the following two steps. (1) We propose ügVisual Marks
with Memory Storage (Fig.2).üh The mark consists of a landmark part, to
support self-positioning and pose measurement of the object, and a memory
part, to inform about what it is, what tasks there are and how to carry
out the task. The marks are disposed to the appropriate place in the working
environment. (2) We verify how it is effective to realize the task of the
robots using ügVisual Marks with Memory Storageüh in the environment arranged
under step (1) by means of an experiment; the robot is assigned to open
the sliding door which is existed several meters apart from the robot (Fig.3).
The progress of the experiment is shown in Fig.4. Six trials resulted in
five successes. In case of success, the total running distance was approximately
10 meters and the average time to finish the task was 8 minutes and 20
seconds. The time is mainly caused by overhead of data transmission between
calculation processes. This is not essential problem because the time can
be reduced by the improvement of the control architecture. The result shows
the effectiveness of the proposed methodology.
Keywords: service robot, environmental support,artificial landmark, mark recognition