道具を用いた複数移動ロボットによる協調搬送
本研究では, 3 次元環境において複数移動ロボットが協調して物体を搬送するための動作計画手法を構築する.その際,作業を柔軟かつ容易に行うために,ロボットが道具を用いる手法を提案する. 3 次元環境において,物体を目標位置まで移動させる作業を考えると,以下の 2 つの問題が解決すべき重要な課題である( Fig. 1 ).
(1) 大域的経路計画
どの場所をどのような姿勢で物体を搬送するかを計画する.障害物を回避しながら目標にまで至る経路を求め,かつどの場所で物体の姿勢を変化させれば良いかを求める.
(2) 物体操作計画
物体の姿勢を変化させる手順を計画する.安定した物体操作を行うには,どのように各ロボットが物体を操れば良いかを求める.
(1) に関しては,効率的かつ柔軟に環境表現を行うために近似セル分解( Octree )を用い, C-Space 上での探索空間の自由度を削減することにより探索の高速化を図った.また,ヒューリスティックとしてポテンシャルを用いて障害物回避を行うと共に,物体操作コストを考慮することにより,移動ロボットで実現性の高い動作を生成した( Fig. 2 ).
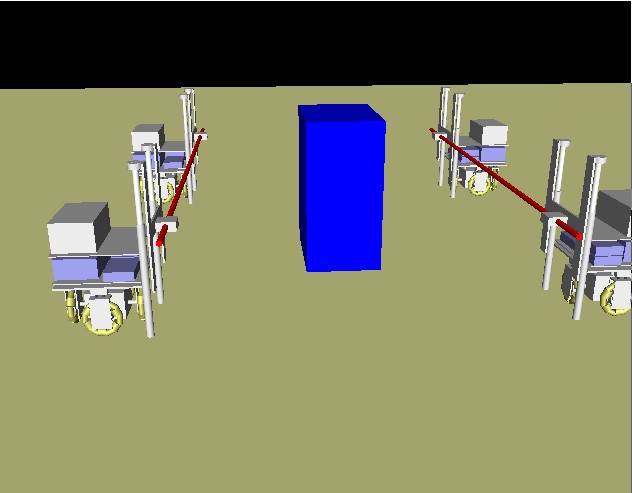
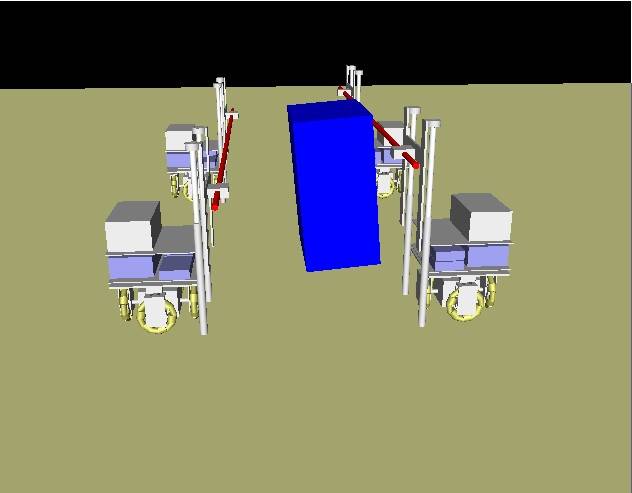
(2) に関しては,棒を道具として用い,複数ロボットが協調して物体操作を行う手法を構築した.操作時に物体に加わる過大な内力を回避するために,誤差に対してロバストな動作を計画し,位置制御ベースのロボットで実現可能な動作を生成した( Fig. 3 ).
また,実機移動ロボット( Fig. 4 )によりこれらの有効性を確認した.
Keywords: Tool, Multiple Mobile Robots, Planning, Cooperation
参考文献
Fig. 1 Motion planning in 3D-space
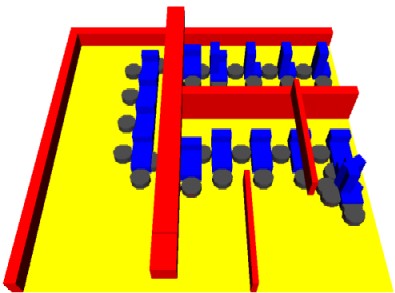
Fig. 2 Result of path planning
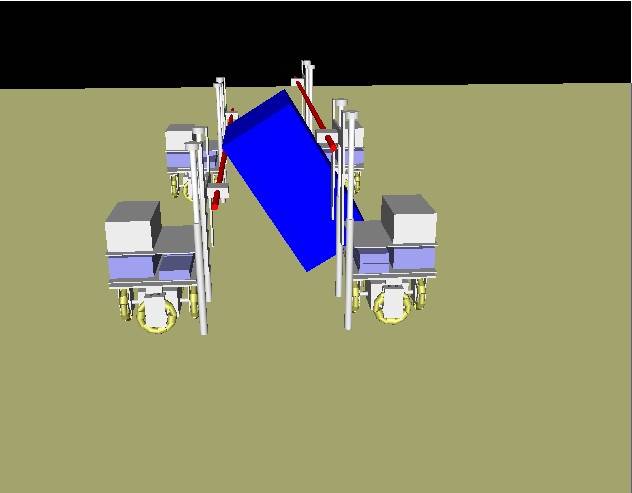
(a) (b) (c)
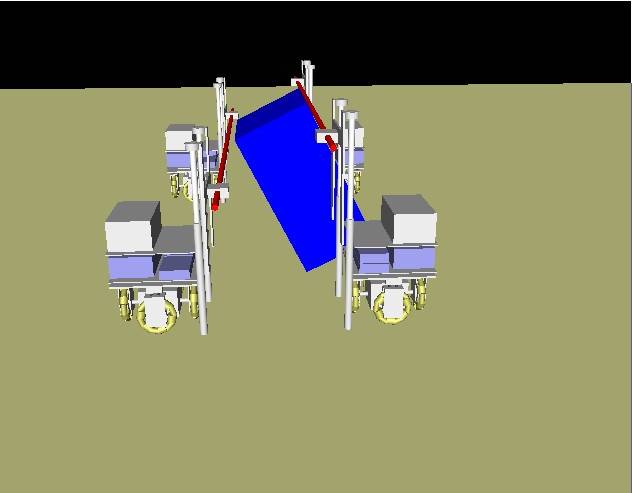
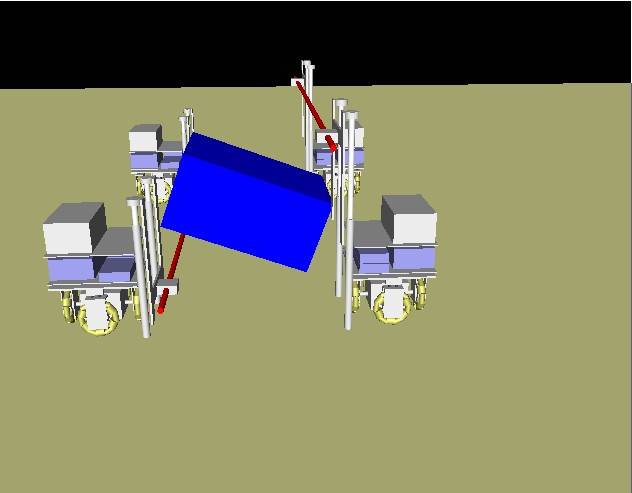
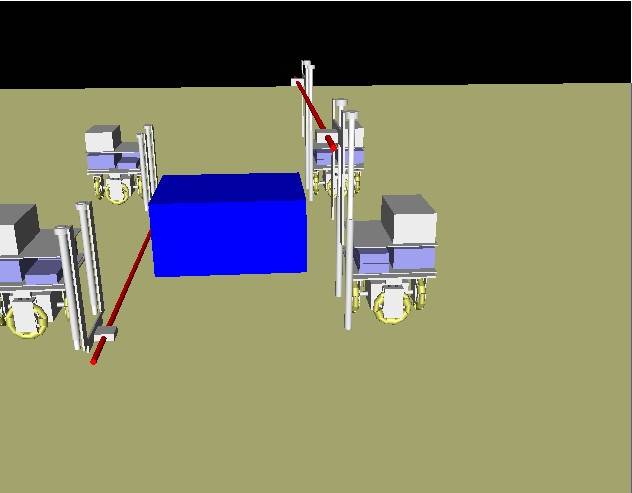
(d) (e) (f)
Fig. 3 Result of manipulation planning
Fig. 4 Mobile robot