機能分化を伴う群ロボット協調作業システム
本研究では,複数台の移動ロボットが,動的な環境において機能を適応的に分化させながら, 協調して作業を行うシステムの実現を目指している(Fig.1). 作業者や障害物が多数存在する環境で大型物体を目的位置まで移動させるためには, 必要な機能(タスク)が作業の進行にしたがって様々に変化する(周辺監視,障害物の除去, 物体のハンドリングなど).そのため,ここでは一定時間毎に,(1)タスクの抽出と割り当て, (2)タスク毎の動作計画,を繰り返すことで動的な環境変化に対応する実時間動作計画の枠組みを 提案する. (1)では,オブジェクト指向に基づき機能を記述したテンプレート群にセンサ情報を入力して 必要なタスクインスタンスを生成し,優先度を考慮して割り当てる(線形計画法を利用) アーキテクチャを提案し,シミュレーションにより有効性を示した(Fig.2, 文献1)). (2)として特に周辺監視タスクについて研究を進めた.監視の必要な領域をロボットの センシングエリアと対象物の動作を考慮して導出し分担する“協調センシング戦略”を提案し, シミュレーションにより有効性を示した(Fig.3,文献2)).その他,物体のハンドリングタスク についても扱っている(文献3)).現在は,Fig.4に示す全方向移動ロボット(ZEN)を用いて, 作業の実現を目指している.
Keywords: Multiple mobile robots, Cooperative transportation, Real-time task-assignment, Linear programming method
参考文献
Fig. 1 Robots in cooperation
(a) Initial state (b) Removing obstacles
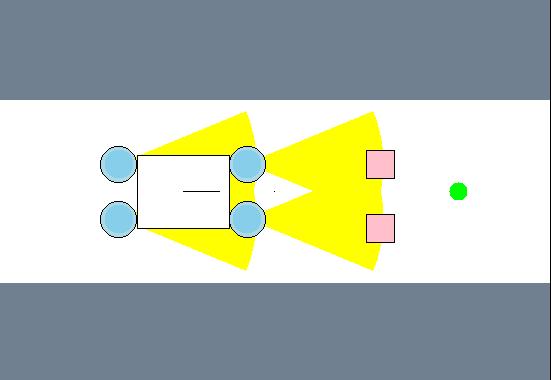
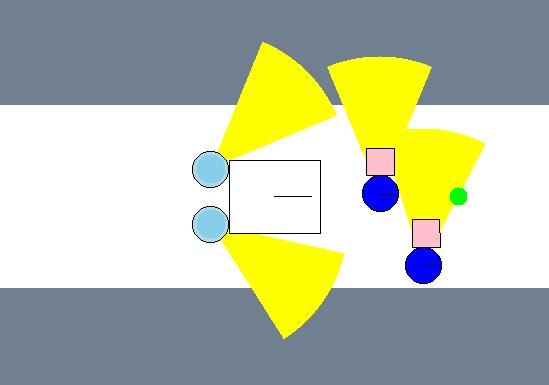
Fig. 2 Simulation results (Task assignment)
(a) Initial state (b) After moving for a while
Fig. 3 Simulation Results (Cooperative Sensing)
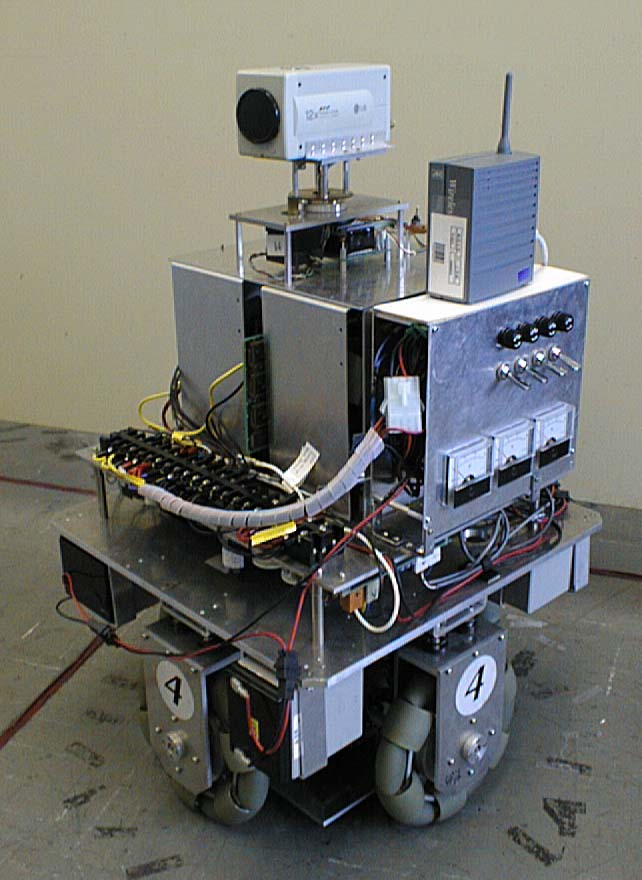
Fig. 4 A Robot for experiments