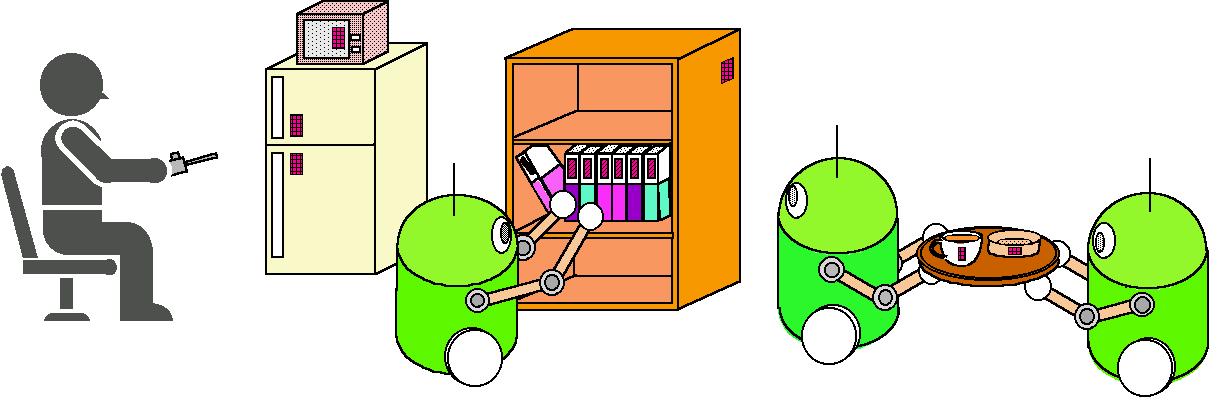
将来,移動ロボットの活躍する場面の増加が予想され,人間とロボットが共存し,要求された作業を完遂することが期待される.その際,既存の環境を改変することなく移動ロボットが環境に適応し,自律的に活動することが理想であるが,現状では技術的に困難である.そこで,本研究グループではロボットに機能の完全性を要求することなく,環境あるいは人間がロボットの機能の一部を分担する,というアプローチをとる( Fig. 1 参照).実世界での使用を念頭におき,統合的システムの開発を図る.
以下の 2 つの問題を解決し,実システムとして統合する.
完全に自律的な複数ロボット・システムを構成することは現状の技術では不可能に近い.従って,ある程度の自律性をもった系に人間が介在し,系と協調して作業を達成する手法が有効である.この場合,操作者と複数ロボットという一対多の関係であるため,人間が全てのロボットの状況を把握し,操作することはできない.人間とロボットの有効な役割分担のあり方を考えつつ,システム開発を行う( Fig. 3 参照).
Fig. 1 Human-robot coexistence
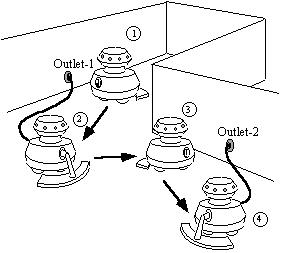
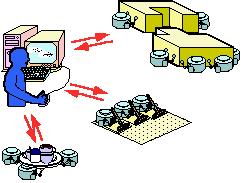
Fig. 2 Use of wall sockets Fig. 3 A human and multiple mobile robots