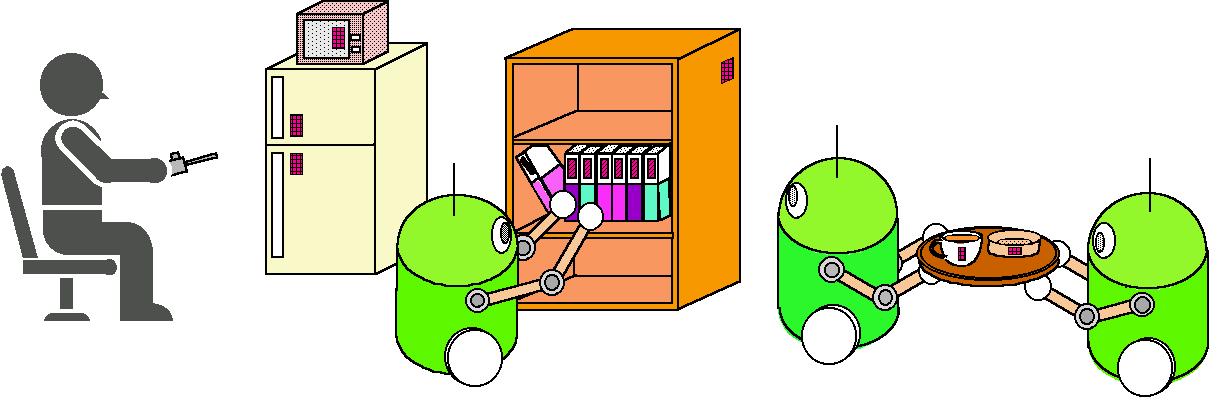
In the future, as the fields of activity for mobile robots extend, robots will have to coexist with humans in order to perform various tasks. The robots will be expected to adapt to usual human environments and move autonomously. Of course, it is possible to implement high-level functions on a single robot. However, it is not feasible from the viewpoints of cost, robot size, technical difficulties and so on. Hence, we will not require robots to have perfect faculties, but will instead have the environment (or the human) provide some of them (see Fig. 1). We develop the system for practical use.
We solve the following two problems and integrate into one system.
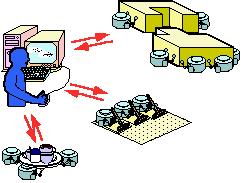
While dealing with multiple mobile robots, the system seldom has true autonomy. We research operation methods to complement the imperfect faculties of robots. When many robots are present, it is impossible for the user to command robots individually and catch up the situation of the whole system. We consider the appropriate relationship between the human and the robots, and develop a system as shown in Fig. 3.
Fig. 1 Human-robot coexistence
 Å@Å@
Å@Å@
 Å@Å@
Å@Å@
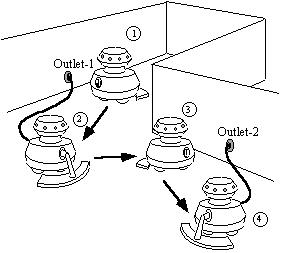
Fig. 2 Use of wall sockets Fig. 3 A human and multiple mobile robots